Control de motor DC con puente H
Este Control de motor DC con puente H se utiliza para controlar el sentido de giro de un motor de corriente continua (motor CC) y lleva este nombre, por la letra “H” que forman el arreglo de los transistores en el circuito. El circuito sirve para controlar motores de mediana potencia, debido a la limitación de potencia de los transistores.
Funcionamiento del Control de motor DC con puente H
El sentido de giro del motor DC depende del los niveles de voltaje que existan en los puntos del circuito etiquetados como: “Avance” y “Retroceso”. Solo uno de estos dos puntos puede estar a nivel alto para activar los transistores correspondientes.
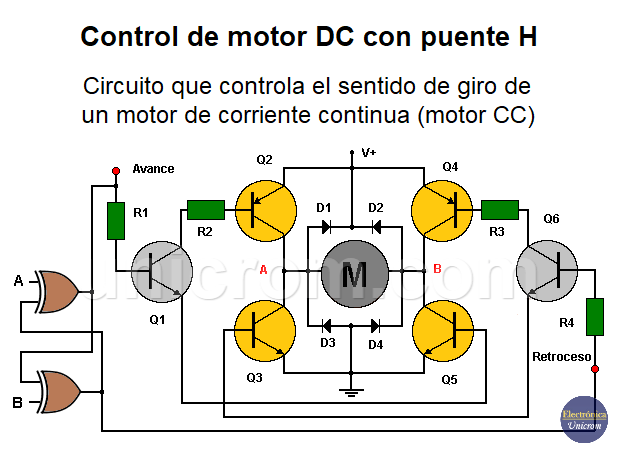
- Si el nivel de voltaje en la etiqueta “Avance” está en nivel alto, se satura el transistor Q1 que a su vez hace entrar en saturación los transistores Q2 y Q5. Estos dos transistores permiten a circulación de corriente por en motor DC en un sentido.
- Si el nivel de voltaje en la etiqueta “Retroceso” está en nivel alto, se satura el transistor Q6 que a su vez hace entrar en saturación los transistores Q3 y Q4. Estos dos transistores permiten a circulación de corriente por en motor DC en el sentido contrario.
Los diodos se colocan para la protección de los transistores, debido al cambio de polaridad en las bobinas del motor DC.
Circuito de control de giro del Motor
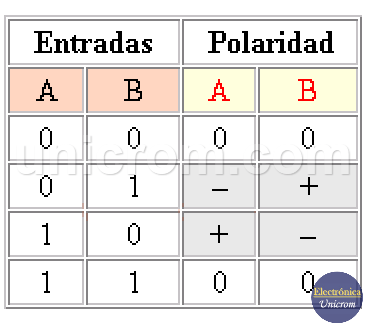
Tabla de verdad del Sistema de Control de motor DC con puente H
Del análisis anterior se entiende que no se deben tener niveles altos de voltaje en ambas etiquetas, por lo que se utiliza un pequeño circuito de control. Este está compuesto por dos compuertas XOR (compuertas O exclusivas) y su funcionamiento (tabla de verdad) se muestra en la figura.
Prestar atención a los puntos A y B (en rojo) en los colectores de los transistores, para ver la polaridad del voltaje que se aplica al motor.
¿Cómo se controla el motor DC con puente H?
Este circuito no controla la velocidad de giro del motor. Este se podría controlar variando el voltaje de alimentación del circuito, o utilizar un control de Modulación por ancho de pulso (PWM o “Pulse Width Modulation”). En el siguiente circuito: Control de velocidad de un motor DC con 555 se muestra un ejemplo de lo que se puede conectar a este circuito para el control de velocidad.
También hay otros métodos de control de un motor de corriente continua, como el control de motor CC con 6 compuertas NOT que controla motores pequeños de juguetes o parecidos, de 6 o 9 voltios. Un control más completo, se puede lograr con este control de velocidad y sentido de giro que utiliza tiristores.
Nota: El voltaje de alimentación debe ser entre 1.2 y 1.4 voltios mayor al voltaje de alimentación del motor DC, debido a las caídas de voltaje en las uniones base-emisor de los transistores en conducción.
Lista de componentes del circuito
- 1 Circuito integrado Compuerta OR exclusiva (XOR) (74LS86)
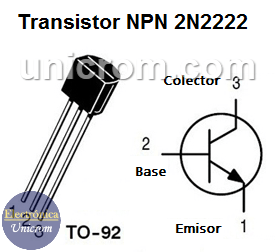
- 2 transistores NPN 2N2222 o equivalente (Q1, Q6)
- 2 transistores PNP TIP32 o equivalente (Q2, Q4)
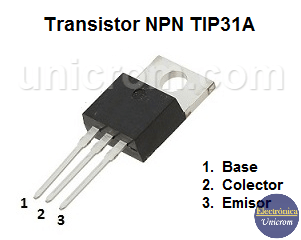
- 2 transistores NPN TIP31 o equivalente (Q3, Q5)
- 2 resistencias 1 K (R1, R4)
- 2 resistencias 27 ohmios (R2, R3)
- 4 diodos: 1N4001 o equivalente (D1, D2, D3, D4)




Chicos. Estoy fascinado con la calidad de los diagramas que tienen.
Fui estudiante de mecatronica. Les deseo un exito maximo.
Hola, José
¡Muchas gracias!